Drone detection and false positivies #972
Comments
|
Well, "solid" technically just means it isn't air ;-) Hmm, properly checking if a block is "passable" for a drone might be overkill, but I'll add a check whether a block returns no collision bounds at all, that should work for most scenarios (such as levers, buttons and torches). |
|
Done. Beware it'll still return |
|
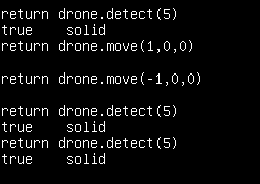
Thanks for fixing, but you might want to change that or the docs:
€: looks ;) |
|
If I still remember it in a few minutes I will ;-) (You could also register and change it, wiki is open for registration and everyone can edit) |
|
Work successfully outsourced ;) But other than that, the block in front doesn't prevent the drone from moving, so shouldn't the boolean return be false? But I'm going to add "passable" as soon as I get the master's answer ;) |
|
Great, thanks ;) The thing is, this is the same method for all agents - it's the exact same code that's used for |
|
Report from slaved worker: D(r)one ;) And thanks again |
|
👍 |
The drone's detect method returns false positives on blocks where a robot couln't pass through but a drone could, e.g. levers.
Here you can see the surrounding.

And here is a picture of the remote drone shell
Greetings and happy 3D modelling ;)
(I used version 1.5.4.471-dev, but according to the commits nothing was changed except some 3d stuff)
The text was updated successfully, but these errors were encountered: